May 24, 2024
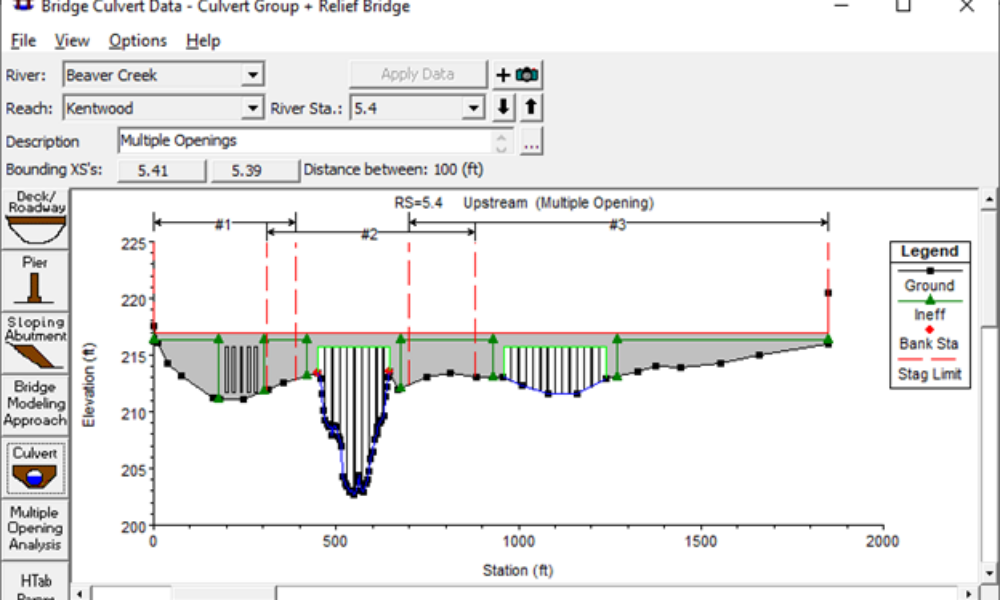
Multiple Opening Analysis
Did you know that if you have a bridge opening and one or more culverts at a single river crossing a Multiple Opening Analysis is required?
In an earlier blog post, we discussed some details regarding modeling overflow gates in HEC-RAS.

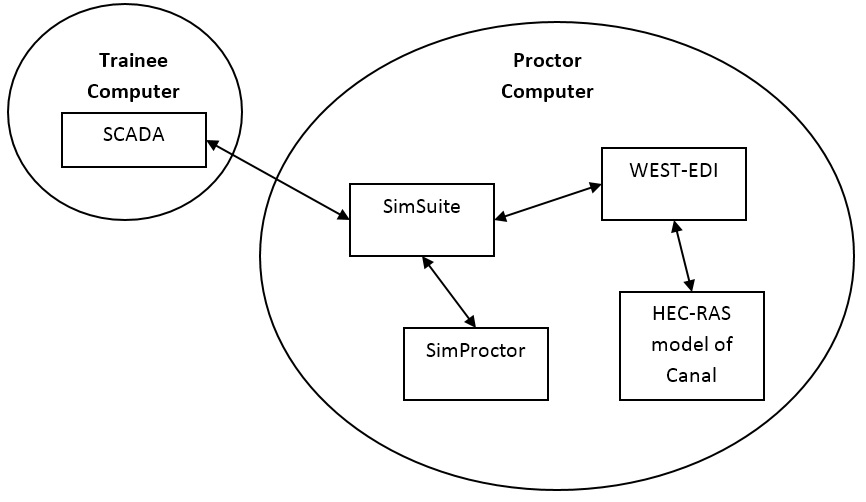
 This question covers many topics from modeling irrigation canals using HEC-RAS to designing automatic controllers for irrigation canals. It also references a project we completed several years ago where we linked an unsteady HEC-RAS model of the Central Arizona Project (CAP) Canal to a Supervisory Control and Data Acquisition (SCADA) program so that the operators of the CAP Canal could be trained using a hydraulic model rather than by operating the real canal. CAP has an extensive SCADA system that allows them to monitor and control the entire 336-mile canal from their central control room.
This question covers many topics from modeling irrigation canals using HEC-RAS to designing automatic controllers for irrigation canals. It also references a project we completed several years ago where we linked an unsteady HEC-RAS model of the Central Arizona Project (CAP) Canal to a Supervisory Control and Data Acquisition (SCADA) program so that the operators of the CAP Canal could be trained using a hydraulic model rather than by operating the real canal. CAP has an extensive SCADA system that allows them to monitor and control the entire 336-mile canal from their central control room. This is similar to the concept of how pilots are trained using a flight simulator instead of flying a real plane. In a way, we created a “flight simulator” for canal operators. To make this project successful, we had utilized many of the HECRASController routines and had to create a program that linked HEC-RAS to the SCADA system. We called this program the External Data Interface (EDI). We are also pleased that the question references the newly published ASCE Manual of Practice (MOP)131 Canal Automation for Irrigation Systems. This new publication is intended to be an update on recent advances in canal automation. On a side note, I was one of the editors for MOP 131, so thanks for the plug on the book!
This is similar to the concept of how pilots are trained using a flight simulator instead of flying a real plane. In a way, we created a “flight simulator” for canal operators. To make this project successful, we had utilized many of the HECRASController routines and had to create a program that linked HEC-RAS to the SCADA system. We called this program the External Data Interface (EDI). We are also pleased that the question references the newly published ASCE Manual of Practice (MOP)131 Canal Automation for Irrigation Systems. This new publication is intended to be an update on recent advances in canal automation. On a side note, I was one of the editors for MOP 131, so thanks for the plug on the book!
3. “Did you calibrate the pools one by one or calibrated [sic] couple of pools together?”
 4. “How did you model turnouts in HEC-RAS? Did you have instability issues in the turnouts?”
4. “How did you model turnouts in HEC-RAS? Did you have instability issues in the turnouts?”
Yes, we modeled turn outs. The turnouts on the CAP Canal are locally automated to deliver a constant flow rate to the turnout regardless of the water level or flow rate in the canal. Thus, the turnouts were modeled as constant outflow hydrographs (unsteady). If you are doing a steady model, the turnouts would be modeled as a flow change location. If you want your turnout to have the flow vary as a function of head in the canal, then you can place a lateral structure where the turnout is located and then put a gate on that lateral structure. RAS will then calculate the flow through the gate based on the head from the water surface in the main canal. If you are not modeling the water after it leaves the turnout, just have RAS remove the water from the system. If you are modeling the water after it leaves the turnout, you will have to create another reach in RAS to model the lateral canal that the water from the turnout flows into. You should not see instability issues due to turnouts. The photo above shows a typical turnout structure on an irrigation canal.
5. “Can HEC-RAS model water levels with +/- 5 centimeter accuracy in irrigation canals?”
That really depends on how accurate your data are. If you have poor information about your canal (e.g., you don’t have as-built plans or there has been settlement in the lining or there is lots of seepage), then you may not be able to get 5 cm accuracy. Probably the largest uncertainty in the canals will be the flow rates. You most likely will not know the flows in the canal to with +/- 5% unless you have very accurate flow measurement devices installed. One suggestion would be to run a sensitivity test on the canal by varying the flows to get an idea regarding how much the water surfaces will fluctuate due to the uncertainty in your flow rates.
Typically in an irrigation system, the water level upstream of a check gate is the “most important” depth. The predicted water level at this location heavily depends on the gate discharge coefficient and the Manning’s roughness coefficient. So if you do not know the gate discharge coefficient (and don’t have any calibration data to determine what it should be), then the water levels upstream of the check can be off by quite a bit. The plot below shows the calibration results for an irrigation canal, where the diamond shapes indicate observed water levels. You can see from this plot that our calibrated model agrees well with some of the observed data points. For other data points, there is some difference between the computed results in HEC-RAS and the observed data. Most likely, the areas where our calibration did not agree well were a result of the uncertainty in the observed data or flow rates.

 7. “Is it possible to use such approach for earthen canals? Do I need to re-calibrate the model after couple of years due to sediment and weeds?”
7. “Is it possible to use such approach for earthen canals? Do I need to re-calibrate the model after couple of years due to sediment and weeds?”
Yes, you can use HEC-RAS to model an earthen canal. Sediment and weeds can influence the Manning’s roughness coefficients. Thus, the canal may respond differently over time due to weed growth and sediment, so this is something that you should consider. The figure below shows weeds growing along the banks of an earthen irrigation canal as well as along the bottom of the canal. These weeds were seasonal and only appeared in the summer months. Another issue would be canal seepage in earthen canals. If you performed a seepage test on a canal pool, you could get an estimate of the rate of water loss from the pool. You could then model this seepage from the canal using unsteady outflow hydrographs or possibly the groundwater interflow internal boundary condition. Without performing a seepage test, you would really need very good (and detailed) calibration data to determine the seepage losses.
10. “Is it possible to use HEC-RAS to model sediment transport in irrigation canals? Is this model reliable?”
Yes, it is possible to use HEC-RAS for sediment transport in irrigation canals. A sediment transport model for an irrigation canal would be just as reliable as any other sediment transport model, which means it really depends on how the model is set up, what data are available, etc. Care needs to be taken to use the correct sediment transport function for the canal. Alternatively, there is a model developed specifically for sediment transport in irrigation canals called SETRIC, which was developed by IHE in the Netherlands. If you are concerned about modeling the sediment transport in an irrigation canal, SETRIC may be a good option for you.



Comments
Abrham
on June 30, 2016Thank you chris, this is very helpful and interesting article. Can you please explain to me how the siphon is represented in your model? How can I represent hydro mechanical gates ( such as Avis and Avio gates )in HEC-Ras for constant upstream or downstream water level, these types of gates have a bit complicated rating curves and they are not among the listed gate types in HEC-Ras inline structure?
Kind regards,
Eric Atakora
on April 17, 2018Please is it possible to couple hecras model with an irrigation scheduling simulation tool? which models would you recommend
Regards
Eric Atakora
on April 17, 2018I want to couple the hecras model with an irrigation scheduling simulation model to assess the over all performance of 3 smallholder irrigation schemes (run of the river, gravity and pump based) in Ghana Please is it possible to couple hecras model with an irrigation scheduling simulation tool? which models would you recommend
Regards
Eric Atakora
on April 17, 2018i want to couple the hecras model with irrigation scheduling simulation model to assess the overall performance of 3 smallholder irrigation schemes ( run of the river pump base and gravity types). I want to find out if that is possible and which irrigation scheduling simulation models would work well with the hecras model
Kind regards
Chris Goodell
on April 21, 2018Not directly, but you can write a program to do the coupling.
Chris Goodell
on May 6, 2018Coupling another software application with HEC-RAS would require some sort of external controller/communicator. Using the HECRASController for writing some code would allow you to do this. See here: http://hecrasmodel.blogspot.com/p/book.html
Eric Atakora
on May 8, 2018Thanks so much Chris
Unknown
on September 30, 2018Hello,I want to use HEC-RAS to carry out a hydraulic analysis of an earth irrigation canal, and to estimate the seepage, any reference materials or methodology
bikram rai
on September 3, 2021Is it possible to use HEC-RAS for calculating the time taken for water to travel from head to tail in a canal system?
Chris Goodell
on September 3, 2021Yes, best to set it up as an unsteady flow model.
Gezimu
on May 16, 2023Dear HEC RAS group
I am planning to model the improvement of the hydraulic performance of an irrigation scheme/canal. I want to use canal linings as an option to improve the hydraulic performance of the canal. How can use this plan in HEC RAS I need guidance. I am new to HEC RAS Model
Add Your Comment